XabslEngine Class Library Reference
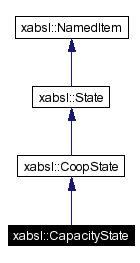
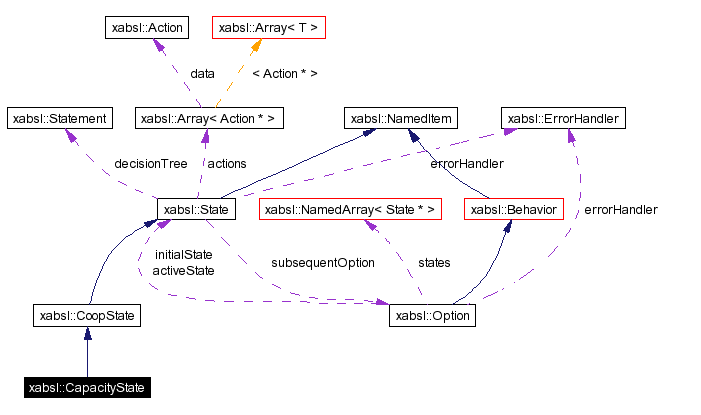
xabsl::CapacityState Class Reference
#include <XabslCoopState.h>
Inheritance diagram for xabsl::CapacityState:
Detailed Description
Represents a state which can only be entered by at most the given number of agents simultaneously.
- Author:
- Max Risler
Definition at line 143 of file XabslCoopState.h.
Public Member Functions | |
| CapacityState (const char *name, ErrorHandler &errorHandler, const unsigned &time, int optionIndex, int index, const int &agentPriority, const int &synchronizationTicks, int capacity) | |
| Constructor. | |
| virtual bool | getConflict () |
| Whether this state is currently conflicted, i.e. | |
| virtual State * | getNextState () |
| Executes the decision tree and determines the next active state (can be the same). | |
| virtual bool | coopCheck () |
| Check whether this state can be entered, or whether entering is blocked due to cooperating agents. | |
Public Attributes | |
| int | capacity |
| Number of agents that can enter the state simultaneously. | |
| bool | conflict |
| Whether this state is currently conflicted, i.e. | |
Constructor & Destructor Documentation
|
||||||||||||||||||||||||||||||||||||
|
Constructor. Does not create the state.
Definition at line 157 of file XabslCoopState.h. References conflict. |
Member Function Documentation
|
|
Whether this state is currently conflicted, i.e. there are more robots executing than the given capacity. Reimplemented from xabsl::State. Definition at line 175 of file XabslCoopState.h. References conflict. |
|
|
Executes the decision tree and determines the next active state (can be the same).
Reimplemented from xabsl::State. Definition at line 183 of file XabslCoopState.h. |
|
|
Check whether this state can be entered, or whether entering is blocked due to cooperating agents.
Reimplemented from xabsl::State. Definition at line 194 of file XabslCoopState.h. References capacity, and xabsl::ErrorHandler::message(). |
Here is the call graph for this function:

Member Data Documentation
|
|
Number of agents that can enter the state simultaneously.
Definition at line 169 of file XabslCoopState.h. Referenced by coopCheck(), and getNextState(). |
|
|
Whether this state is currently conflicted, i.e. there are more robots executing than the given capacity. Definition at line 172 of file XabslCoopState.h. Referenced by CapacityState(), getConflict(), and getNextState(). |
The documentation for this class was generated from the following file:
Up | Main Page | Generated at Wed Aug 19 17:32:30 2009.